
Robot Quadrupedu Intelligente


Introduzione
Aghjurnamentu di l'algoritmu: Muvimenti più agili è agili
Ottene una capacità di superamentu di ostaculi più forte è movimenti di alta difficultà
1. Pò saltà sopra e trincee, saltà in altu, fà salti frontali è altri movimenti di alta difficultà
2. Scalà scalini di 15 cm, guasi l'altezza massima ottenibile da robot quadrupedi di a listessa taglia
3. Supporta salti mortali all'indietro, torsioni di u corpu, salti torsionali, ondeggiamenti, moonwalk, ribaltamenti è alzatevi, ecc.
Evoluzione Scalabile
Cuncepimentu mudulare per una espansione senza limiti
U caricu di caminata di 1,4,5 kg espande assai u spaziu di espansione
2. Fornisce interfacce di sviluppu di capacità di percezione avanzate (SDK è API)
3. Cù una struttura mudulare aperta è interfacce, chì supportanu l'installazione di moduli RTK, 5G, host AI, processori edge è vari sensori
4. Equipatu di lidar è camera di prufundità, chì permette u sviluppu approfonditu di capacità di percezione avanzate cum'è a navigazione autonoma, l'arrestu automaticu di l'ostaculi è l'evità, u pusizionamentu visuale è a ricustruzione di l'ambiente
50% Aumentu di a Coppia Articulare: Potenza Putente per i Muvimenti
I moduli di trasmissione di giunti à coppia elevata sviluppati autonomamente presentanu una densità di coppia ultra-alta, una larghezza di banda di risposta è un'efficienza di trasmissione inversa.
Aumentu di 1,40% di a carica utile massima di caminata
2. Resistenza di muvimentu quasi radduppiata, cù un tempu di muvimentu cuntinuu di 90 minuti è una autonomia di 5 km
Triplice crescita di a putenza di calculu di u sistema di cuntrollu di qualità industriale
Aduttà IMU di qualità industriale per un aghjurnamentu cumpletu di a stabilità è di a putenza di calculu
1. Prima introduzione di un sistema di cuntrollu in tempu reale di qualità industriale cù un kernel prufundamente ottimizatu
2. A putenza di calculu generale hè aumentata di quasi 3 volte
3. Cù una cumunicazione in tempu reale elevata è una frequenza di cuntrollu finu à 1kHz
Sistema d'interazione uomo-macchina cumpletamente aggiornatu
1. Prestazioni di trasmissione d'imagine in tempu reale in prima vista migliorate cù latenza ridutta
2. Aggiunta l'interazione cù u linguaghju luminosu, chì permette à l'utilizatori d'ottene diversi stati di u robot quadrupede in tempu reale
3. Muvimenti assistiti da a percezione più sicuri è più diversi
4. Supporta l'arrestu di l'ostaculi anteriori è posteriori, u ricunniscimentu è u seguitu, l'evità di l'ostaculi in avanti, a navigazione autonoma è altre funzioni
Parametri tecnichi
| 1. Piattaforma hardware | |
| Dimensione in piedi | Lunghezza 610mm ± 10mm, Larghezza 370mm ± 10mm, Altezza 445mm ± 10mm |
| Dimensione di a menzogna | Lunghezza 680mm ± 10mm, Larghezza 370mm ± 10mm, Altezza 175mm ± 10mm |
| Pesu tutale (cù batteria) | circa 12,2 kg |
| Resistenza à svuotamentu | 1,5 ore ~ 2 ore, autonomia: 4 km |
| U robot adotta un algoritmu di cuntrollu di forza cumpletu per l'equilibriu. Pò realizà una rilevazione di forza 3D senza cecità à 360° à u pede senza sensori di pressione di a sola, cù una bassa usura di u pede è un bassu costu di manutenzione. | |
| Materiale | Cosce: lega d'aluminiu; gambali: plastica cumposta d'alta resistenza; s Oli: gomma chì assorbe i colpi, hè antiscivolo è resistente à l'usura. |
| batteria | Equipatu cù una batteria à u litiu inseribile; capacità di a batteria ≥4400mAh, energia nominale ≥126.7Wh; tempu di carica: 40min ~ 1h. |
| DOF | Gradi di libertà tutali (DOF): 12; DOF per gamba: 3. |
| modulu cumunu | Adotta un modulu di giunzione integratu cù un diametru esternu ≤76 mm; cumpostu da un mutore à alta densità di coppia, un riduttore d'alta precisione, un encoder assolutu è un sensore di temperatura. |
| Uscita di putenza integrata (5V/12V/24V) è interfacce di cumunicazione (Ethernet/WiFi) per un sviluppu secundariu cunveniente. | |
| Modi di prutezzione | arrestu d'emergenza dolce, allarme di bassa tensione, allarme di surriscaldamentu. |
| 2. Cuntrollu di u muvimentu |
| Adotta un sensore inerziale di qualità industriale; risoluzione di l'accelerometru finu à 0,09 mg, risoluzione di u giroscopiu finu à 0,004 ° / s. |
| Frequenza di cuntrollu di u bus di cumunicazione: 1kHz. |
| Fornisce una camminata stabile è andature veloci |
| Supporta l'andature cumprese a salita di scale, pendenze, strisciando; pendenza massima di salita: 40° (secondu u materiale di a pendenza); altezza massima cuntinua di a scala: 15 cm; adattabile à strade di cimentu, strade di ghiaia, ecc. |
| Caricu di caminata cuntinua: finu à 4,5 kg. |
| Supporta i passi in situ, a traduzzione avanti/indietro/sinistra/destra, a rotazione sinistra/destra. |
| Fornisce diverse azzioni di dimostrazione: saltu in avanti, saltu torsionale, moonwalk, ecc.; distanza massima di saltu in avanti: 50 cm. |
| Supporta u sviluppu di altre andature è muvimenti d'altu rendimentu |
| 3. Percezione Intelligente |
| Camera grandangulare*1: FOV urizzuntale 130°; 1920×1080@30fps; antiriflessu, senza distorsioni; supporta u ricunniscimentu di u corpu umanu è u sviluppu di algoritmi di tracciamentu. |
| Radar à ultrasoni*2: supportanu a rilevazione di distanza è u sviluppu di algoritmi di fermata di l'ostaculi. |
| Equipatu di sistemi per evità ostaculi frontali è posteriori. |
| 4. Sviluppu Secundariu |
| Fornisce un mudellu di robot, un SDK è API di muvimentu, una dimostrazione di sviluppu di muvimentu è manuali dettagliati di sviluppu secundariu. |
| Fornisce interfacce di software di sviluppu di percezione cù manuali d'usu è di sviluppu dettagliati; sistema ROS integratu per un sviluppu secundariu rapidu. |
Introduzione di a Cumpagnia
In u 2008, Beijing Hewei Yongtai Technology Co., LTD hè stata stabilita in Pechino. Si cuncentra nantu à u sviluppu è l'operazione di l'equipaggiu di sicurezza speciale, serve principalmente a lege di sicurezza publica, a pulizza armata, l'armata, e duane è altri dipartimenti di sicurezza naziunale.
In u 2010, Jiangsu Hewei Police Equipment Manufacturing Co., LTD hè stata fundata in Guannan. Cù una superficia di 9000 metri quadrati di attelli è uffici, u so scopu hè di custruisce una basa di ricerca è sviluppu di prima classe in Cina per l'equipaggiu di sicurezza speciale.
In u 2015, un centru di ricerca è sviluppu militare-pulizia hè statu creatu in Shenzhen. Cuncentratu nantu à u sviluppu di l'equipaggiu di sicurezza speciale, hà sviluppatu più di 200 tipi di equipaggiu di sicurezza prufessiunale.






Esposizioni d'oltremare


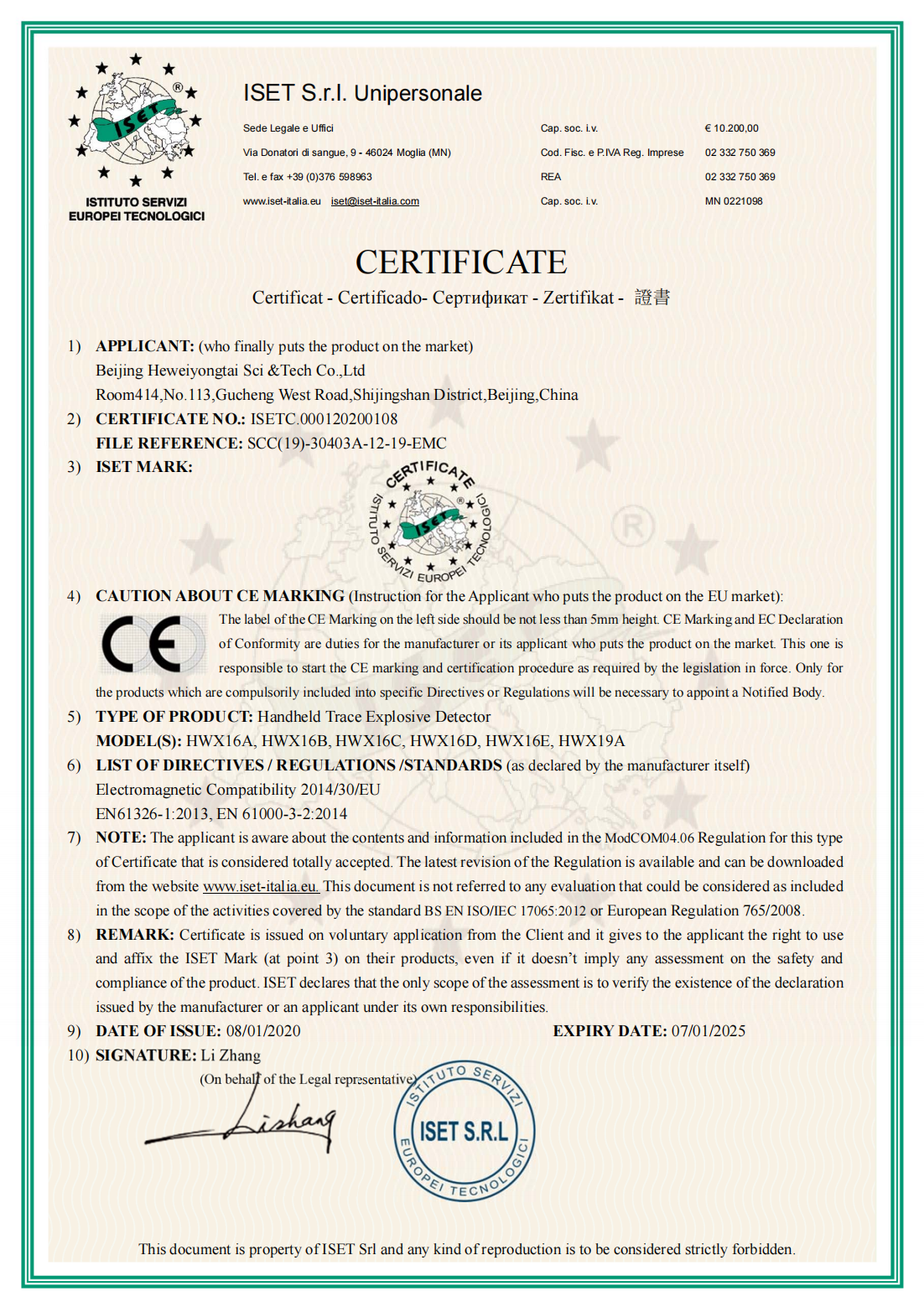
Certificati

Beijing Heweiyongtai Sci & Tech Co., Ltd. hè un Fornitore Principale di Soluzioni EOD è di Sicurezza. U nostru persunale hè cumpostu da prufessiunali tecnichi è manageriali qualificati per furnisce un serviziu soddisfacente.
Tutti i prudutti anu rapporti di prova di livellu prufessiunale naziunale è certificati d'autorizazione, dunque per piacè state sicuri di urdinà i nostri prudutti.
Cuntrollu di qualità strettu per assicurà una longa vita di serviziu di u produttu è un travagliu sicuru di l'operatore.
Cù più di 10 anni di sperienza in l'industria per EOD, equipaggiamenti antiterrorismi, dispositivi d'intelligenza, ecc.
Avemu servitu prufessiunalmente più di 60 paesi clienti in u mondu sanu.
Nisun MOQ per a maiò parte di l'articuli, consegna rapida per l'articuli persunalizati.




